fig4
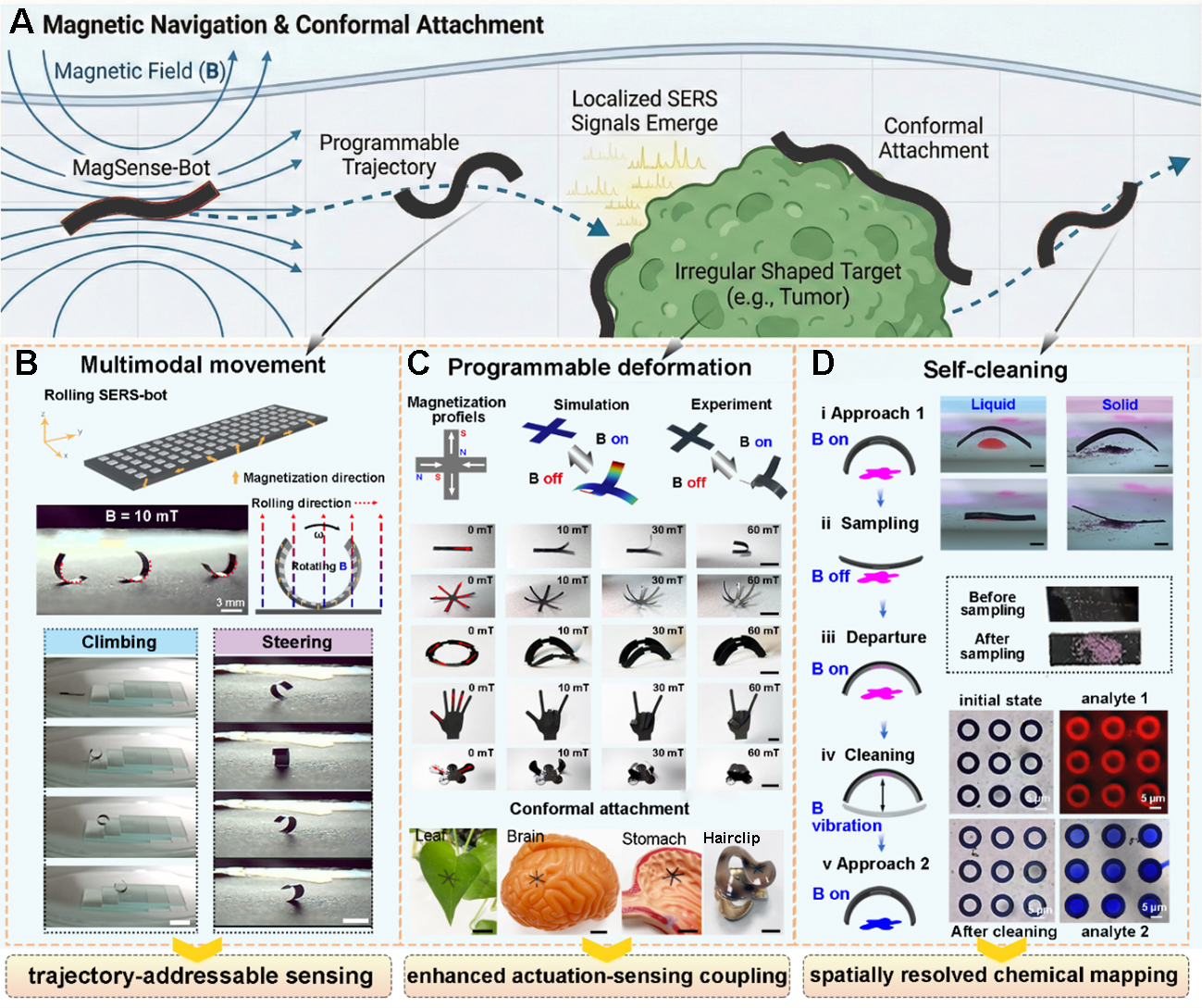
Figure 4. Magnetically enabled mobile SERS sensing through multimodal locomotion and programmable deformation. (A) Schematic illustration of the MagSense-Bot performing mobile SERS sensing; (B) Time-lapse optical images of multimodal locomotion of the magnetic robot, scale bar: 5mm; (C) Programmable deformation of the robot under magnetic actuation, scale bar 5 mm; (D) Schematic and experimental demonstration of a magnetically controlled sensing process. SERS: Surface-enhanced Raman scattering.