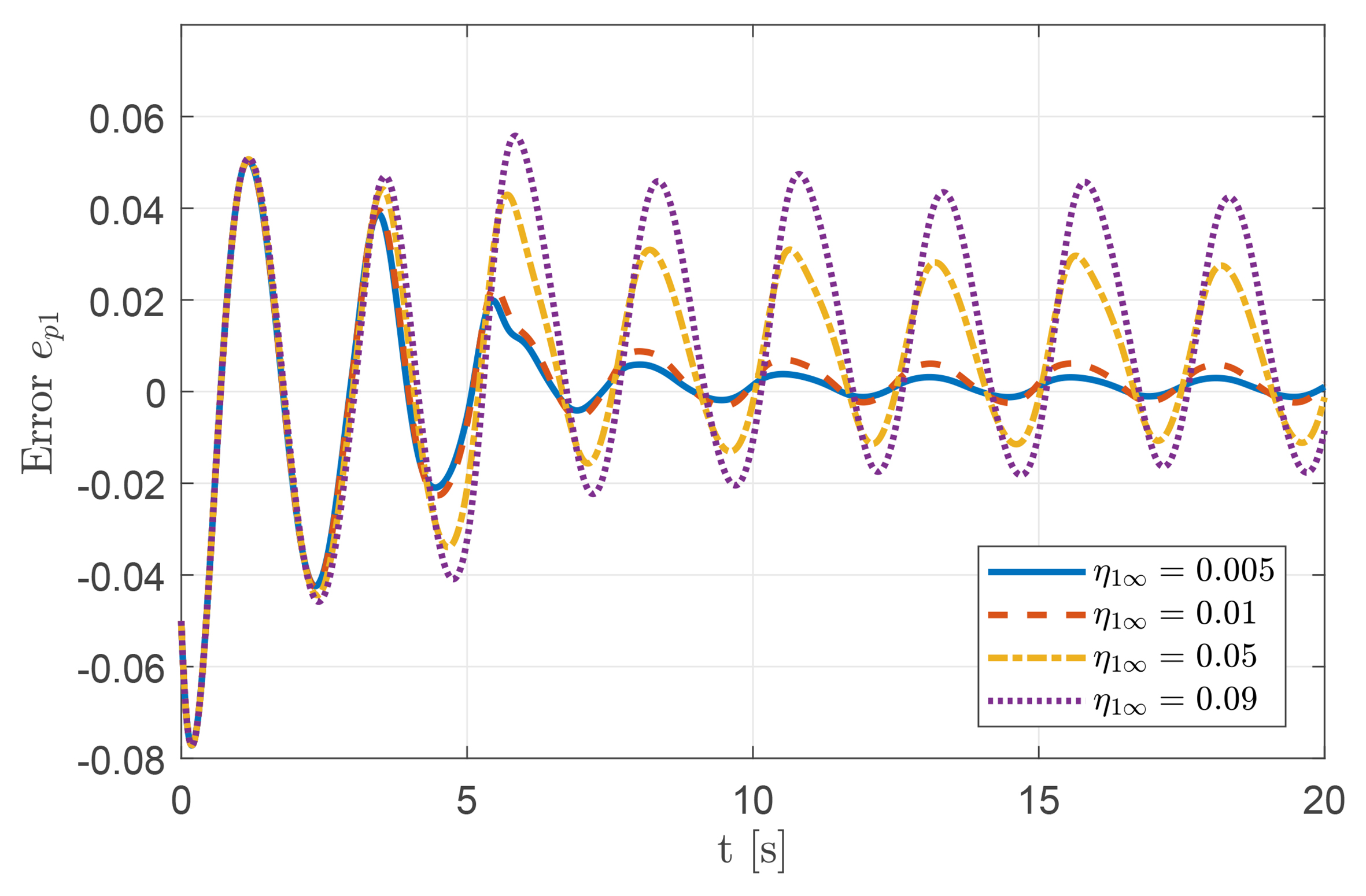
Figure 13. Attitude tracking error $$ e_{p1} $$ under different prescribed performance constraints $$ \eta_{1\infty} $$.
All published articles are preserved here permanently: