


An improved U-Net model with multiscale fusion for retinal vessel segmentation
 0
0 
Abstract
The condition of the retinal vessels is involved in various ocular diseases, such as diabetes, cardiovascular and cerebrovascular diseases. Accurate and early diagnosis of eye diseases is important to human health. Recently, deep learning has been widely used in retinal vessel segmentation. However, problems such as complex vessel structures, low contrast, and blurred boundaries affect the accuracy of segmentation. To address these problems, this paper proposes an improved model based on U-Net. In the proposed model, pyramid pooling structure is introduced to help the network capture the contextual information of the images at different levels, thus enhancing the receptive field. In the decoder, a dual attention block module is designed to improve the perception and selection of fine vessel features while reducing the interference of redundant information. In addition, an optimization method for morphological processing in image pre-processing is proposed, which can enhance segmentation details while removing some background noise. Experiments are conducted on three recognized datasets, namely DRIVE, CHASE-DB1 and STARE. The results show that our model has excellent performance in retinal vessel segmentation tasks.
Keywords

1. INTRODUCTION
The retina is a unique region for direct visualization and imaging. It can reflect the signs of many systemic diseases. By examining the shape, curvature and branching patterns of retinal vessels, clinicians can provide crucial diagnostic services for the early identification and ongoing care of eye diseases [1,2]. However, it takes a lot of work to manually identify blood vessels in fundus images and cumbersome task relying on the experience of ophthalmologists, and there is a lack of specialists who can perform this task independently [3]. Therefore, the development of the precise and effective segmentation method will be beneficial in the diagnosis of eye diseases [4,5].
Traditional retinal vessel segmentation methods utilize the morphological features of the vessels, and mainly rely on morphological operations [6]. Early vessel segmentation methods include feature pixel-based methods, matched filter-based methods, and vessel tracking-based methods [7]. However, these traditional methods rely on domain experience, which are sensitive to image quality and noise, leading to poor segmentation results. So their performances are limited.
In recent years, retinal vessel segmentation technology based on deep learning has been more widely studied and applied [7]. In retinal vessel segmentation, deep-learning networks have outperformed conventional methods [8]. For example, convolutional neural networks (CNNs) have achieved excellent performance in numerous visual tasks with their powerful nonlinear feature extraction capabilities [9,10,11], bringing new possibilities for retinal vessel segmentation. Now, the network-derived model based on U-Net achieves good vessel segmentation results [12,13]. However, these methods exhibit significant limitations when processing retinal vasculature: (1) Traditional U-Net frequently neglects local structural features, particularly for thin vessels or irregular vascular morphologies; (2) Background artifacts and noise inherent in fundus photography substantially degrade segmentation precision; (3) Despite strong local feature extraction, the architecture struggles to integrate global context with fine-grained details required for vessels exhibiting large scale variations. The structure in retinal vessel images is intricate and complex, and the images will be affected by light, resolution, noise and other factors during the information acquisition process of fundus camera. Therefore, the vessels in the image may appear blurred, broken or overlapped in different degrees. These factors make the segmentation task very difficult.
To address above problems, we improve U-Net and propose a new retinal vessel segmentation model. Firstly, we highlight the image features in the image pre-processing stage after grayscale conversion, normalization, CLAHE and Gamma correction, to emphasize the detailed characteristics, thereby accentuating the differences between vascular structures and surrounding backgrounds to provide clearer input for subsequent segmentation. Then, morphological processing is applied to enhance accuracy by eliminating tiny, noisy components and fine-tuning the vessel structure to increase the contrast between the vessel edges and the background, significantly improving the discernibility of vascular structures and enabling more precise segmentation of fine vessels. Secondly, the pyramid pooling structure (PSP) is integrated in the decoder to capture information of the image in different scales, thus realizing the fusion of multiscale information, and enhancing the characterization of local details. It enables the model to better segment the entire vessel structure. In addition, to enhance the segmentation capability of fine vessels, we add a dual attention block (DAB) in the decoder. The network may dynamically learn the relative relevance of each channel, which enables it to focus more on fine vessels by adaptively adjusting the importance of different channels to improve fine vessel segmentation capability. The network may modify its attention based on the spatial location of the pixel according to the spatial attention mechanism, which is crucial for modifying the attention of various regions to accommodate fine vessels, which effectively addresses the challenges of morphological variability and scale heterogeneity in retinal vessel images, further enhancing the model's focus on local details.
The main contributions of this paper are summarized as follows. (1) A new model for retinal vessel segmentation is designed. The proposed model integrates the PSP structure to capture scale features and improve the characterization of local detailed vessels; (2) A DAB module is presented in the model. It improves the segmentation of retinal fine vessels; (3) We conduct experimental comparison of our model using the DRIVE, CHASE-DB1, and STARE datasets with models proposed recently. The results show that our model outperforms previous models.
2. RELATED WORK
2.1. Medical image segmentation
Deep learning has gradually become a commonly used technology for medical images segmentation [14]. Among them, U-Net has a simple but effective structural design and good applicability for domain-specific tasks such as medical images [15,16]. In addition, it can achieve better segmentation results with relatively less labeled data and training time. Currently, most segmentation methods based on deep learning use the encoder-decoder architecture. On this basis, the segmentation effect is improved by introducing attention mechanisms and optimizing the loss [17].
Some representative models based on U-Net are introduced as follows. Ahmad et al. [18] developed MH-UNet, which is a new architecture for medical image segmentation. It combines multiscale information and expands the receptive field size of feature maps. For example, Deng et al. used ELU-Net, which is an efficient lightweight U-Net where the deep skip connections have the same massive skip connections as the encoder for comprehensive feature extraction[19]. Nguyen et al. proposed a cascaded context module (CCM) and a balanced-attention module (BAM)[20]. Xiang et al. proposed a network that adds a multiscale feature extraction (MFE) module while reducing the number of convolutional kernel filters per layer[21]. It enhances the sensitivity of the model.
Those models above show that U-Net has become one of the most popular deep learning frameworks. However, it should be further studied in retinal vessel segmentation.
2.2. Retinal vessels segmentation
Deep neural networks demonstrate significant potential for retinal vasculature segmentation [22]. But the vessels are characterized by a complex structure, weak texture, and low edge contrast. Therefore, precise retinal vessel segmentation continues to be a difficult undertaking [23].
Scholars have conducted many studies to improve segmentation. Some researchers adopted the strategy of integrating multiscale features. For instance, Ye et al. proposed a U-shaped network, which enhances scale features and preserves more vessel details during decoding[24]. In order to learn adaptive weights to improve vessel features, Shi et al. computed the multiscale force field to capture its semantic relationship with the mask image pixels[25]. Zhou et al. divided the fundus image into plaques of different sizes and designed a cascaded dilated spatial pyramid pooling (CDSPP) module in the model to enhance the multiscale features and vessel continuity[26]. Despite the fact that multiscale fusion has many advantages and achieves respectable segmentation performance, they are nevertheless constrained by the following issues. On the one hand, multiscale fusion makes the network structure more complex, which reduces the interpretability of the model and makes it difficult to intuitively understand the exact process of segmentation of retinal images by the network. On the other hand, the introduction of multiscale fusion increases the number of parameters of the network, which requires more training data for adequate training, leading to the problem of over-fitting.
In retinal vessel segmentation, some scholars used attention mechanisms to improve models. For example, Guo et al. introduced a spatial attention module and replaced the original convolutional blocks of U-Net with dropout blocks to achieve network lightweighting[27]. Su et al. proposed a cross-scale attention (CSA) block to model multiscale interactions within vascular regions, thereby extracting rich contextual semantics[28]. Dong et al. proposed CRAUNet[29]. In CRAUNet, dropblock regularization is introduced to reduce over-fitting. Mahmoud et al. extended the Residual U-Net architecture through a cross-attention U-Net framework, enhancing network adaptability and contextual comprehension capabilities to address critical limitations inherent in residual U-Net designs[30]. Wang et al. proposed a multi-attention method based on directed graph search[31]. By building a directed graph representation of the vessels, the method improves the topology and spatial connectivity. Although the introduction of the attention mechanism has become a mainstream method, the existing approaches are still unable to properly balance the global information capture of vessel structure and the segmentation accuracy of fine vessels.
To address these limitations, a morphological optimization strategy is proposed at the image processing stage. When processing retinal vessel images, the noise points in the images are reduced and the edge burrs of vessels are minimized, resulting in smoother and more continuous boundaries. In addition, the PSP structure and dual attention module are integrated in our proposed model. This allows the model to enhance the detailed features of vessels while capturing and fusing information at different scales, improving segmentation performance and reducing redundant information.
3. METHODOLOGY
To deal with the problems that exist in retinal vessel segmentation, an improved deep neural network based on U-Net is proposed. Figure 1 is the overall workflow of our method. In this paper, input images are processed by converting to grayscale, normalization, CLAHE, Gamma correction and Morphology. Then, data enhancement is performed using inversion and rotation. Finally, the proposed model is used for retinal vessel segmentation.
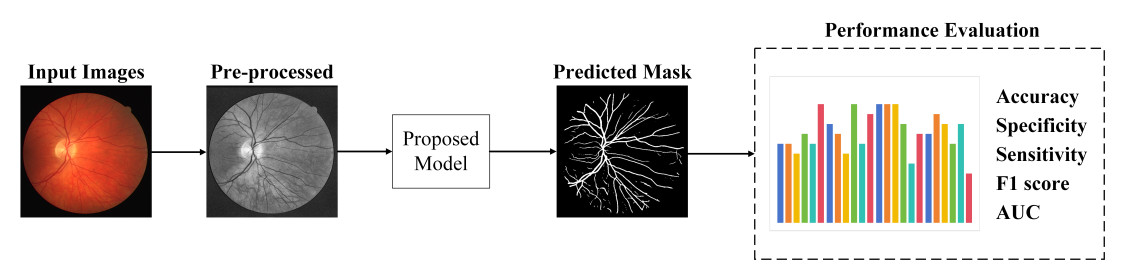
Figure 1. The overall workflow of our proposed method for retinal vessel segmentation.
3.1. Image processing
The fundus images may be affected by lighting conditions, lens quality and other factors, resulting in poor image quality or insufficient contrast. Image processing is a crucial routine step in medical image segmentation, which can enhance image quality and contrast. In this paper, fundus images are processed using grayscale conversion, CLAHE, normalization, Gamma correction and morphological processing. Figure 2 presents the steps used for image pre-processing of input images.
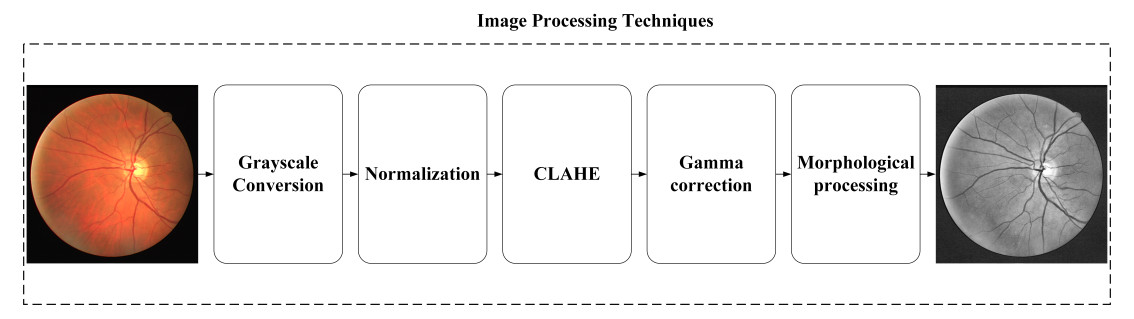
Figure 2. Image processing steps of the proposed method.
At first, the input color images are converted to grayscale. Converting color images to grayscale for vessel segmentation does not entail complete information loss. Instead, it simplifies input data by reducing redundant color channels, allowing the model to focus on critical luminance and contrast properties essential for vascular structure identification. Grayscale imaging further enhances vessel boundaries and structural details. Additionally, this approach reduces computational burden by streamlining data processing, thereby improving training efficiency and model performance. Normalization adjusts the value of each pixel to standardize. CLAHE enhances the contrast of fundus images [32]. Gamma correction strengthens the morphology of vessels by adjusting the brightness of images. Morphological processing removes fine noise from an image by convolving its structural elements. It makes the vessel boundaries clearer. Retinal vessels face the problem of limited data availability. After completing dataset pre-processing, we implemented data augmentation on the retinal fundus image collection. Our augmentation pipeline applied deterministic geometric transformations, specifically 90°, 180°, and 360° rotations combined with flipping, generating six distinct variants per original image. Additionally, all augmented images underwent standardized partitioning into
3.2. Network architecture
Figure 3 presents the structure of the proposed model, which is a U-shaped network. Considering the problem that the dataset images are small, the data features are also relatively small. In order to fully compute the image edge feature information, we perform padding around the image before the convolution calculation. In this way, the edge features will not be under-computed due to the positional problem even after the convolutional computation. However, as the network becomes more complex, the problem of vanishing gradients often arises, worsening the learning process. Therefore, we add a normalization operation Batch Normalization (BN) after the convolution operation, so that the distribution of features is brought back to the sensitive region of the function. The BN operation can turn the original distribution of eigenvalues of the data after each layer of convolution operation into a standard normal distribution, so that the distribution of features of the data can always be in the sensitive region of the activation function, and the loss function can also have a large change in the process of calculation [33]. In the decoder, we also add padding operation and BN operation. In addition, to capture global context information through pooling operations at different scales, we add a PSP structure after each up-sampling layer. The acquired information is spliced with the features of the current layer to improve image performance. In our model, a DAB module is added before the output layer. DAB is used to dynamically adjust the weights of the network so that it focuses on fine vessels. It can adjust its attention to changes in fine vessels based on the spatial location of the pixels. This can help to improve segmentation results.
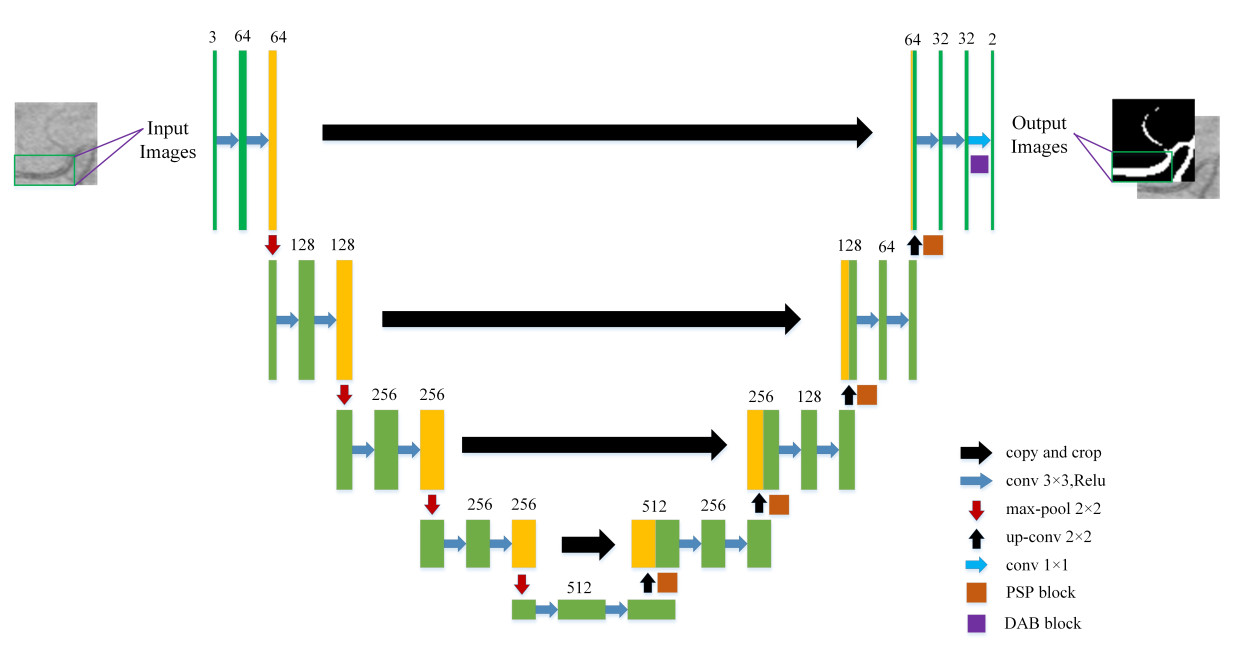
Figure 3. Network structure of the proposed model.
3.3. PSP structure
The PSP is shown in Figure 4. Using average pooling kernels such as
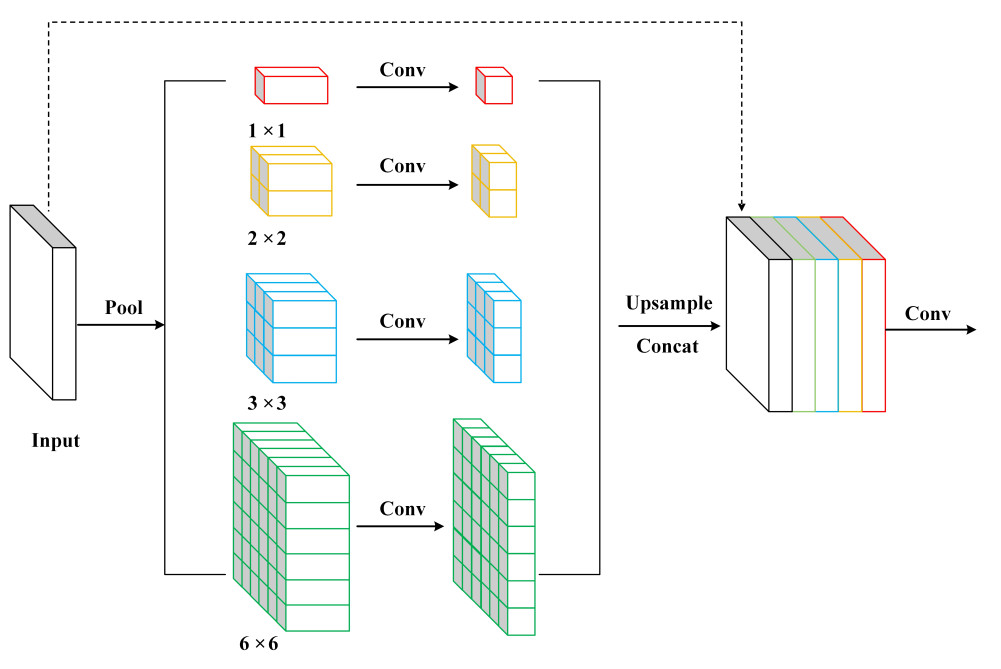
Figure 4. The structure of the PSP module. PSP: Pyramid pooling structure.
3.4. DAB module
To enhance the extraction of fine vessel features, this paper proposes a DAB to enhance fine vessel segmentation in retinal images. The feature map is decoded using DAB and the image size is gradually adjusted to produce the results. The structure of DAB is shown in Figure 5. The channel attention mechanism enhances the feature response of the important channels, operating independently of input modalities by dynamically recalibrating feature channel responses in the input tensor. This enables the network to amplify critical features while suppressing less informative ones through learned inter-channel dependencies. Within the DAB module, single-channel features are processed identically to multi-channel inputs, applying channel-wise recalibration to enhance discriminative feature representation, allowing the model to distinguish the fine vessels from the background more effectively. The spatial attention mechanism captures local features of fine vessels by enhancing the feature responses of important spatial locations, and more accurately localizes and segments fine blood vessels.
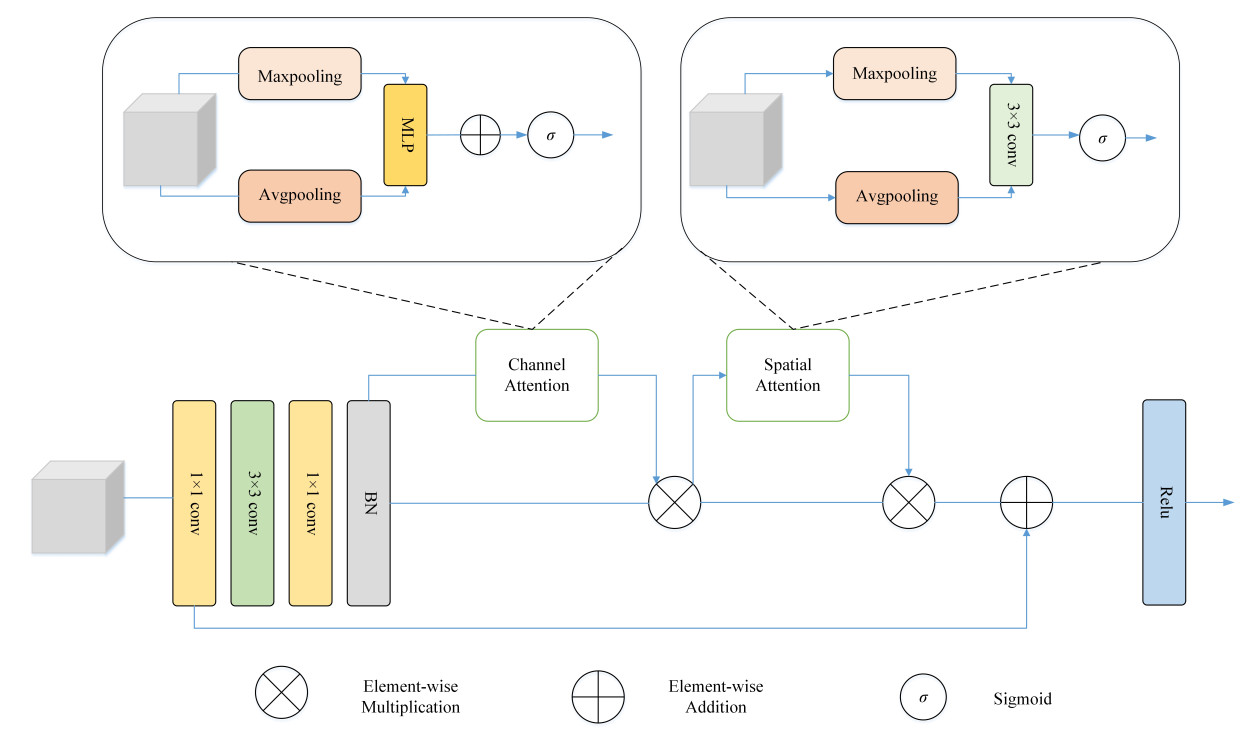
Figure 5. The structure of the DAB module. DAB: Dual attention block.
In Figure 5, we use
where
At last, the enhanced results are fed into the spatial attention module to improve feature representation and suppress interference information, which can be given as:
where
3.5. Loss function
Since the binary cross entropy loss function can better optimize the model in the case of class imbalance, we choose it as the loss function of our model.
where
4. EXPERIMENTS
4.1. Datasets and experimental configuration
The model proposed in this paper is verified on three public datasets, namely DRIVE, CHASE-DB1, and STARE [34,35]. (1) DRIVE: DRIVE is a widely used dataset. It includes 40 images, each with a size of
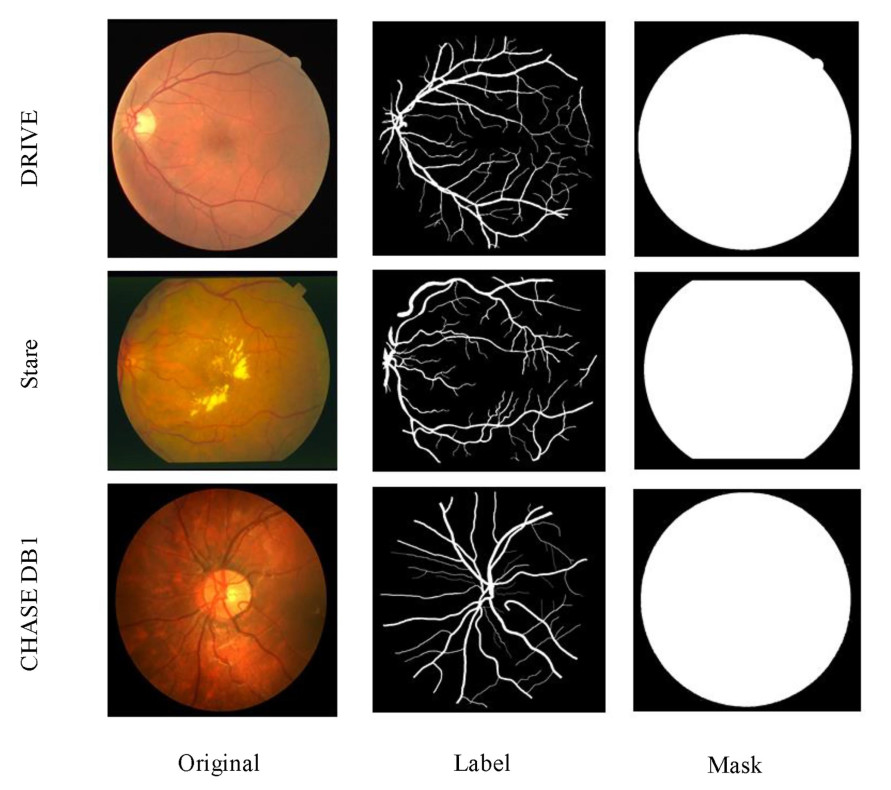
Figure 6. Original image, label image and mask image of three datasets.
Our model is built based on the Tensorflow. Experiments are implemented on a NVIDIA GeForce GTX 1050 Ti platform using Keras (Tensorflow as the backend). During hyperparameter optimization, we conducted systematic experiments across varying epoch counts (50, 100, 150) and batch sizes (16, 32, 64), aimed at methodically assessing training duration effects. Based on comprehensive comparisons of the critical relationships between hyperparameters (such as segmentation accuracy and convergence rate) and model efficacy, we selected a batch size of 16 with 200 epochs and a 0.0001 learning rate using the Adam optimizer to balance accuracy and efficiency. To ensure equitable evaluation across all compared methods, we maintained rigorous consistency in experimental conditions: identical dataset partitions, standardized evaluation protocols, and uniform hardware environments. Each method underwent hyperparameter optimization within identical computational constraints. This framework explicitly minimizes confounding factors, guaranteeing that performance differentials solely reflect algorithmic capabilities rather than experimental variability.
4.2. Evaluation metrics
In order to more accurately evaluate our model, accuracy (
where
4.3. Experimental results
In the detection process, we input the pictures and masks of the test set into the model, and the size of each picture is
Comparative experiments on the DRIVE datasets
| Method | Year | ACC | F1 | SP | SE | AUC |
| U-Net [36] | 2016 | 95.57 | 81.26 | 98.11 | 76.15 | 97.06 |
| R2U-Net [37] | 2018 | 95.56 | 79.83 | 98.08 | 76.06 | 88.62 |
| CE-Net [38] | 2019 | 96.16 | 82.69 | 98.09 | 80.23 | 98.10 |
| CPFNet [39] | 2020 | 95.51 | 81.88 | 97.83 | 79.60 | 97.14 |
| MHSU-Net [40] | 2021 | 95.74 | 82.86 | 97.91 | 80.84 | 98.13 |
| DEF-Net [41] | 2022 | 94.57 | 78.51 | 96.99 | 77.99 | 97.19 |
| AAU-Net [42] | 2022 | 95.58 | 82.11 | 97.84 | 79.53 | 97.64 |
| Wave-Net [43] | 2023 | 95.61 | 82.54 | 97.64 | 81.64 | - |
| IterMiU-Net [44] | 2023 | 95.75 | 82.77 | 98.05 | 80.06 | 98.11 |
| PGU-Net [45] | 2024 | 95.72 | 82.50 | 98.14 | 79.15 | 98.12 |
| nnU-Net [46] | 2024 | 96.52 | 78.58 | 97.90 | 81.62 | 98.40 |
| Ours | - | 96.78 | 81.33 | 98.14 | 82.44 | 98.62 |
Comparative experiments on the CHASE-DB1 datasets
| Method | Year | ACC | F1 | SP | SE | AUC |
| U-Net[36] | 2016 | 96.37 | 80.25 | 98.21 | 78.38 | 97.10 |
| R2U-Net [37] | 2018 | 96.44 | 79.28 | 98.30 | 78.39 | 84.95 |
| CPFNet [39] | 2020 | 96.42 | 82.14 | 98.40 | 79.94 | 97.67 |
| DEF-Net [41] | 2022 | 94.41 | 77.73 | 97.01 | 76.61 | 95.80 |
| RCAR-UNet [47] | 2023 | 95.66 | 74.70 | 97.98 | 74.75 | - |
| SDDC-Net [48] | 2023 | 96.69 | 79.65 | 97.89 | 82.68 | 98.45 |
| ETAU-Net [49] | 2023 | 96.99 | - | 98.26 | 78.03 | 97.79 |
| PGU-Net [45] | 2024 | 96.58 | 80.99 | 98.17 | 80.51 | 98.57 |
| nnU-Net [46] | 2024 | 96.89 | 81.53 | 98.64 | 80.55 | 98.34 |
| Ours | - | 97.17 | 78.50 | 99.02 | 78.07 | 97.74 |
Comparative experiments on the STARE datasets
| Method | Year | ACC | F1 | SP | SE | AUC |
| U-Net [36] | 2016 | 96.17 | 80.78 | 98.67 | 75.40 | 97.02 |
| LadderNet [50] | 2018 | 96.08 | 80.75 | 98.75 | 75.55 | 98.17 |
| AttU-Net [51] | 2019 | 96.36 | 82.35 | 98.60 | 78.65 | 98.19 |
| CPFNet [39] | 2020 | 96.18 | 81.56 | 98.52 | 77.83 | 97.96 |
| LightWeight [52] | 2021 | 96.31 | 82.48 | 98.51 | 79.03 | 97.36 |
| AAU-Net [42] | 2022 | 96.32 | 82.43 | 98.68 | 78.07 | 97.61 |
| IterMiU-Net [44] | 2023 | 96.32 | 82.33 | 98.68 | 78.19 | 98.51 |
| DASENet [53] | 2023 | 97.28 | 82.31 | 98.39 | 84.02 | 99.02 |
| IMFF-Net [54] | 2024 | 97.07 | 83.47 | 98.69 | 86.34 | - |
| nnU-Net [46] | 2024 | 97.33 | 82.37 | 98.49 | 85.06 | 99.13 |
| Ours | - | 97.50 | 80.98 | 98.09 | 87.75 | 99.32 |
First, we evaluated the model on the DRIVE dataset. There are many vessel ends in the low-contrast region of the image. It is critical to accurately segment the end of vessels. In Table 1, our model achieves 96.78%, 81.33%, 98.14%, 82.44% and 98.62% on
Secondly, results conducted on the CHASE-DB1 dataset are presented in Table 2. Our model is more prominent in
Finally, Table 3 describes comparative results based on the STARE dataset, which includes many lesions, including hemorrhages and exudative inflammation, and half of the pathologic images [26]. However, at the same time, the STARE dataset has a relatively high image quality and clear vascular structures. From Table 3, compared with the models in recent papers (see [53] and [54]), our method outperforms them in
Experimental time analysis on the DRIVE datasets
| Model | U-Net | nnU-Net | Ours |
| Experimental time ( | 0.1225 | 0.6834 | 0.3445 |
4.4. Analysis on visualization and experimental time
In order to visualize the segmentation performance, this study was analyzed through visualization. Figure 7 shows the comparison image of our model, the U-Net and the nnU-Net. Although U-Net can segment the main vessels, it performs poorly in the fine vessels, resulting in poor vessel connectivity. nnU-Net achieves marginally superior overall performance compared to U-Net, yet exhibits consistently suboptimal preservation of morphological details in fine vessel segmentation. In contrast, our proposed new model performs better. Segmentation accuracy is primarily augmented through two interconnected mechanisms. Firstly, DAB's dual-attention framework adaptively prioritizes capillary signatures via channel-wise feature recalibration while spatially modulating focus to accommodate morphological heterogeneity. Secondly, PSP's hierarchical fusion concurrently processes macrovascular context and microstructural details, establishing comprehensive multiscale representations essential for complex vasculature. The interaction between the PSP structure and the DAB module preserves more vessel details. To sum up, the proposed model performs exceptionally.
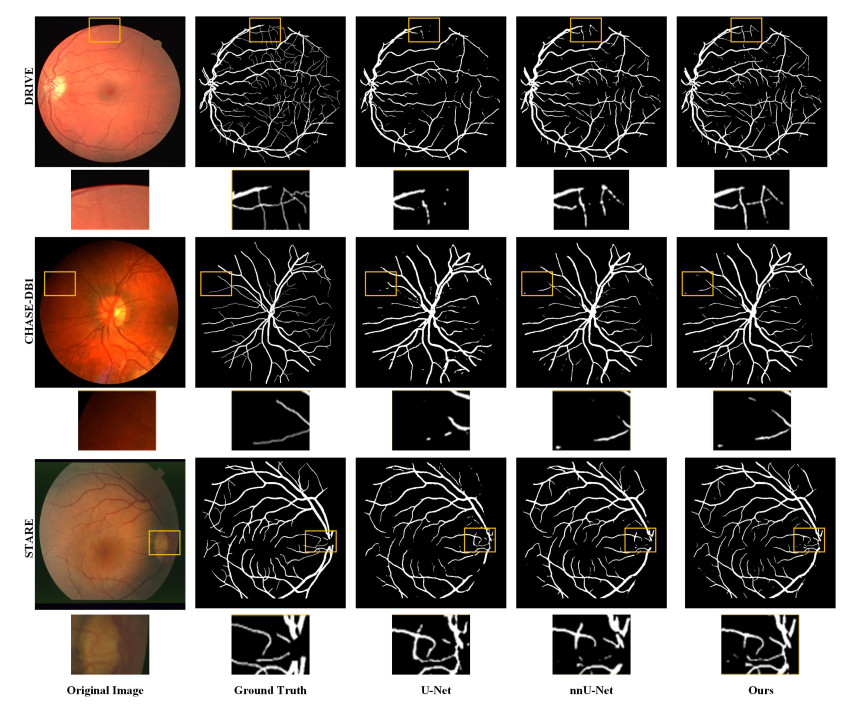
Figure 7. Comparison of the visualization results between our model, the U-Net and the nnU-Net.
To show the computation efficiency, the experimental time of the three models (our proposed model, the U-Net and the nnU-Net) on the DRIVE dataset is given out, which is listed in Table 4. The results show that our proposed model demonstrates significant efficiency advantages. U-Net requires 0.1225 seconds per image. While nnU-Net's adaptive pre-processing and cross-validation strategies enhance segmentation accuracy, these improvements incur substantially increased computational costs, yielding 0.6834 s per image. Comparatively, though introducing additional model complexity relative to U-Net, our proposed novel architecture achieves only 0.3445 s per image while maintaining competitive segmentation performance.
4.5. Ablation experiments
Among three datasets used, DRIVE is the most generally applicable dataset, and we use it as an example for ablation experiments. The proposed method has three main components, including morphological pre-processing (PRE-Pro), PSP and DAB modules. U-Net was selected as the baseline and three important components were incorporated in sequence. Table 5 presents the results.
Ablation experiments on the DRIVE datasets
| Method | ACC | F1 | SP | SE | AUC |
| U-Net | 96.39 | 79.01 | 97.38 | 80.53 | 97.16 |
| U-Net + PRE-Pro | 96.48 | 79.63 | 98.00 | 80.49 | 98.40 |
| U-Net + PRE-Pro + PSP | 96.55 | 79.92 | 97.99 | 81.28 | 98.51 |
| U-Net + PRE-Pro + DAB | 96.69 | 81.25 | 98.30 | 80.52 | 98.50 |
| U-Net + PRE-Pro + PSP + DAB | 96.78 | 81.33 | 98.14 | 82.44 | 98.62 |
Firstly, morphological pre-processing was applied to the baseline (U-Net + PRE-Pro). It is clear that the performance of the U-Net + PRE-Pro model exceeds that of the baseline network. The information obtained from Table 5 allows us to determine that the evaluation metrics were all improved to some extent after adding the pre-processing optimization method morphological treatment to the baseline (U-Net + PRE-Pro). Compared with U-Net,
Second, we added the PSP structure (U-Net + PRE-Pro + PSP). In Table 5, the performance is improved in terms of
We import the DAB module into the model (U-Net + PRE-Pro) called (U-Net + PRE-Pro + DAB) to validate its effectiveness. The network is assisted in learning the relationships between different channels by the channel attention module, which enables it to better extract useful feature information. By enhancing the weights of key channels, the network is able to better recognize vessel structures. Thereby,
Finally, to efficiently capture contextual information and enhance segmentation of fine vessel structures, we designed a new model referred to as (U-Net + PRE-Pro + PSP + DAB). Compared with U-Net, our model can improve the segmentation of fine blood vessels due to the DAB module. In Table 5, compared with U-Net, our method shows that all evaluation metrics are improved.
Overall, our model shows excellent performance in retinal vessel segmentation. Specifically, the results show that each component in the model has a certain improvement on the segmentation results. After integrating the components, we also obtain the best segmentation results.
5. CONCLUSION
Considering that retinal vessels are characterized by complex structure, fragility of blood vessels, and blurred boundaries of fine vessels, we proposed a new retinal vessel segmentation model. Specifically, we add an optimization method of morphological processing in the image pre-processing stage to reduce noise points and preserve as much vessel structure as possible. The PSP structure and DAB module added in the decoder section help to capture global and local information, enhance the focus on crucial aspects while suppressing irrelevant features. Our method was experimented with and analyzed on three publicly available datasets, showing improved accuracy in blood vessel segmentation.
Although our experimental results show promise and excellence of the model, it can still be further improved. On CHASE-DB1 dataset, which has poor fundus image quality and less vascular connectivity, our model's segmentation results are not well balanced and have limited validity. In addition, the
DECLARATIONS
Authors' contributions
Funding acquisition: Ni, J.
Project administration: Ni, J.; Gu, Y.
Writing - original draft: Shi, J.
Writing - review and editing: Zhan, Q.; Zhang, Z.; Gu, Y.
Availability of data and materials
Publicly available datasets were analyzed in this study. These data can be found here: https://www.kaggle.com/datasets/andrewmvd/drive-digital-retinal-images-for-vessel-extraction/data, https://www.kaggle.com/datasets/buffyhridoy/chase-db1, and https://www.kaggle.com/datasets/vidheeshnacode/stare-dataset.
Financial support and sponsorship
This work was partly supported by the National Natural Science Foundation of China (61873086).
Conflicts of interest
Ni, J. is an Associate Editor of the journal Intelligence & Robotics. Ni, J. was not involved in any steps of the editorial processing, notably including reviewer selection, manuscript handling, and decision-making. The other authors declare that there are no conflicts of interest.
Ethical approval and consent to participate
Not applicable.
Consent for publication
Not applicable.
Copyright
© The Author(s) 2025.
REFERENCES
1. Liu, Y.; Shen, J.; Yang, L.; Bian, G.; Yu, H. ResDO-UNet: a deep residual network for accurate retinal vessel segmentation from fundus images. Biomed. Signal. Process. Control. 2023, 79, 104087.
2. Rayachoti, E.; Gundabatini, S. G.; Vedantham, R. Recurrent Residual Puzzle based Encoder Decoder Network (R2-PED) model for retinal vessel segmentation. Multimed. Tools. Appl. 2024, 83, 39621-45.
3. Pan, J.; Gong, J.; Yu, M.; Zhang, J.; Guo, Y.; Zhang, G. A multilevel remote relational modeling network for accurate segmentation of fundus blood cessels. IEEE. Trans. Instrum. Meas. 2022, 71, 1-14.
4. Li, Z.; Guan, J.; Wang, H. A novel dual-supervised convolutional network for retinal vessel segmentation. In 2022 International Conference on Image Processing, Computer Vision and Machine Learning (ICICML), Xi'an, China. Oct 28-30, 2022. IEEE; 2022. pp. 567–71.
5. Chen, Y.; Ge, P.; Wang, G.; Weng, G.; Chen, H. An overview of intelligent image segmentation using active contour models. Intell. Robot. 2023, 3, 23-55.
6. Wang, H.; Zuo, W.; Li, B.; Pan, X.; Liu, Z.; Lan, R. Dilation-supervised learning: a novel strategy for scale difference in retinal vessel segmentation. IEEE. Trans. Artif. Intell. 2024, 5, 1693-707.
7. Kumar, K. S.; Singh, N. P. Analysis of retinal blood vessel segmentation techniques: a systematic survey. Multimed. Tools. Appl. 2023, 82, 7679-733.
8. Singh, L. K.; Khanna, M.; Thawkar, S.; Singh, R. Deep-learning based system for effective and automatic blood vessel segmentation from Retinal fundus images. Multimed. Tools. Appl. 2024, 83, 6005-49.
9. Ni, J.; Chen, Y.; Chen, Y.; Zhu, J.; Ali, D.; Cao, W. A survey on theories and applications for self-driving cars based on deep learning methods. Appl. Sci. 2020, 10, 2749.
10. Ye, C.; Che, K.; Yao, Y.; et al. A deep learning-based system for accurate detection of anatomical landmarks in colon environment. Intell. Robot. 2024, 4, 164-78.
11. Ni, J.; Chen, Y.; Tang, G.; Shi, J.; Cao, W.; Shi, P. Deep learning-based scene understanding for autonomous robots: a survey. Intell. Robot. 2023, 3, 374-401.
12. Wang., H.; Xu, G.; Pan, X.; et al. Attention-inception-based U-Net for retinal vessel segmentation with advanced residual. Comput. Electr. Eng. 2022, 98, 107670.
13. Zhou, Z.; Rahman Siddiquee, M. M.; Tajbakhsh, N.; Liang, J. UNet++: a nested U-Net architecture for medical image segmentation. In Deep Learning in Medical Image Analysis and Multimodal Learning for Clinical Decision Support, Granada, Spain. Springer, Cham; 2018. pp. 3–11.
14. Li, L.; Qin, J.; Lv, L.; et al. ICUnet++: an Inception-CBAM network based on Unet++ for MR spine image segmentation. Int. J. Mach. Learn. Cybern. 2023, 14, 3671-83.
15. Tang, G.; Ni, J.; Chen, Y.; Cao, W.; Yang, S. X. An improved CycleGAN based model For low-light image enhancement. IEEE. Sens. J. 2024, 24, 21879-92.
16. Yang, X.; Li, Z.; Guo, Y.; Zhou, D. DCU-net: a deformable convolutional neural network based on cascade U-net for retinal vessel segmentation. Multimed. Tools. Appl. 2022, 81, 15593-607.
17. Kang, N.; Wang, M.; Pang, C.; et al. Cross-patch feature interactive net with edge refinement for retinal vessel segmentation. Comput. Biol. Med. 2024, 174, 108443.
18. Ahmad, P.; Jin, H.; Alroobaea, R.; et al. MH UNet: a multi-scale hierarchical based architecture for medical image segmentation. IEEE. Access. 2021, 9, 148384-408.
19. Deng, Y.; Hou, Y.; Yan, J.; Zeng, D. ELU-Net: an efficient and lightweight U-Net for medical image segmentation. IEEE. Access. 2022, 10, 35932-41.
20. Nguyen, T. C.; Nguyen, T. P.; Diep, G. H.; Tran-Dinh, A. H.; Nguyen, T. V.; Tran, M. T. CCBANet: cascading context and balancing attention for polyp segmentation. In Medical Image Computing and Computer Assisted Intervention - MICCAI 2021, Strasbourg, France. Springer, Cham; 2021. pp. 633–43.
21. Xiang, Z.; Ning, C.; Li, M.; et al. AFFD-Net: a dual-decoder network based on attention-enhancing and feature fusion for retinal vessel segmentation. IEEE. Access. 2023, 11, 45871-87.
22. Liskowski, P.; Krawiec, K. Segmenting retinal blood vessels with deep neural networks. IEEE. Trans. Med. Imaging. 2016, 35, 2369-80.
23. Li, J.; Gao, G.; Yang, L.; Liu, Y. A retinal vessel segmentation network with multiple-dimension attention and adaptive feature fusion. Comput. Biol. Med. 2024, 172, 108315.
24. Ye, Y.; Pan, C.; Wu, Y.; Wang, S.; Xia, Y. MFI-Net: multiscale feature interaction network for retinal vessel segmentation. Biomed. Health. Inform. 2022, 26, 4551-62.
25. Shi, T.; Ding, X.; Zhou, W.; et al. Affinity feature strengthening for accurate, complete and robust vessel segmentation. IEEE. J. Biomed. Health. Inform. 2023, 27, 4006-17.
26. Zhou, W.; Bai, W.; Ji, J.; Yi, Y.; Zhang, N.; Cui, W. Dual-path multi-scale context dense aggregation network for retinal vessel segmentation. Comput. Biol. Med. 2023, 164, 107269.
27. Guo, C.; Szemenyei, M.; Yi, Y.; Wang, W.; Chen, B.; Fan, C. SA-UNet: spatial attention U-Net for retinal vessel segmentation. In 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy. Jan 10-15, 2021. IEEE; 2021. pp. 1236–42.
28. Su, H.; Gao, L.; Wang, Z.; Yu, Y.; Hong, J.; Gao, Y. A hierarchical full-resolution fusion network and topology-aware connectivity booster for retinal vessel segmentation. IEEE. Trans. Instrum. Meas. 2024, 73, 1-16.
29. Dong, F.; Wu, D.; Guo, C.; Zhang, S.; Yang, B.; Gong, X. CRAUNet: a cascaded residual attention U-Net for retinal vessel segmentation. Comput. Biol. Med. 2022, 147, 105651.
30. Mahmoud, M.; Mansour, M.; Elrefai, H. M.; Hamed, A. J.; Rashed, E. A. Enhanced retinal arteries and veins segmentation through deep learning with conditional random fields. Biomed. Signal. Process. Control. 2025, 106, 107747.
31. Wang, G.; Huang, Y.; Ma, K.; et al. Automatic vessel crossing and bifurcation detection based on multi-attention network vessel segmentation and directed graph search. Comput. Biol. Med. 2023, 155, 106647.
32. Mishra, A. Contrast Limited Adaptive Histogram Equalization (CLAHE) approach for enhancement of the microstructures of friction stir welded joints. arXiv 2021, arXiv: 2109.00886. https://doi.org/10.48550/arXiv.2109.00886. (accessed 21 Jul 2025).
33. Ni, J.; Shen, K.; Chen, Y.; Yang, S. X. An improved SSD-like deep network-based object detection method for indoor scenes. IEEE. Trans. Instrum. Meas. 2023, 72, 1-15.
34. Yang, D.; Zhao, H.; Yu, K.; Geng, L. NAUNet: lightweight retinal vessel segmentation network with nested connections and efficient attention. Multimed. Tools. Appl. 2023, 82, 25357-79.
35. Du, X. F.; Wang, J. S.; Sun, W. Z.; Zhang, Z. H.; Zhang, Y. H. Bi-directional ConvLSTM residual U-Net retinal vessel segmentation algorithm with improved focal loss function. J. Intell. Fuzzy Syst. 2024, 46, 1-20. https://www.researchgate.net/publication/379530297_Bi-directional_ConvLSTM_residual_U-Net_retinal_vessel_segmentation_algorithm_with_improved_focal_loss_function. (accessed 21 Jul 2025).
36. Ronneberger, O.; Fischer, P.; Brox, T. U-Net: convolutional networks for biomedical image segmentation. In Medical Image Computing and Computer-Assisted Intervention - MICCAI 2015, Munich, Germany. Springer, Cham; 2015. pp. 234–41.
37. Zahangir Alom, M.; Yakopcic, C.; Taha, T. M.; Asari, V. K. Nuclei segmentation with recurrent residual convolutional neural networks based U-Net (R2U-Net). In NAECON 2018 - IEEE National Aerospace and Electronics Conference, Dayton, USA. Jul 23-26, 2018. IEEE; 2018. pp. 228-33.
38. Gu, Z.; Cheng, J.; Fu, H.; et al. CE-Net: context encoder network for 2D medical image segmentation. IEEE. Trans. Med. Imaging. 2019, 38, 2281-92.
39. Feng, S.; Zhao, H.; Shi, F.; et al. CPFNet: context pyramid fusion network for medical image segmentation. IEEE. Trans. Med. Imaging. 2020, 39, 3008-18.
40. Ma, H.; Zou, Y.; Liu, P. X. MHSU-Net: a more versatile neural network for medical image segmentation. Comput. Methods. Programs. Biomed. 2021, 208, 106230.
41. Li, J.; Gao, G.; Yang, L.; Liu, Y.; Yu, H. DEF-Net: a dual-encoder fusion network for fundus retinal vessel segmentation. Electronics 2022, 11, 3810.
42. Chen, G.; Li, L.; Dai, Y.; Zhang, J.; Yap, M. H. AAU-Net: an adaptive attention U-Net for breast lesions segmentation in ultrasound images. IEEE. Trans. Med. Imaging. 2023, 42, 1289-300.
43. Liu, Y.; Shen, J.; Yang, L.; Yu, H.; Bian, G. Wave-Net: a lightweight deep network for retinal vessel segmentation from fundus images. Comput. Biol. Med. 2023, 152, 106341.
44. Kumar, A.; Agrawal, R. K.; Joseph, L. IterMiUnet: a lightweight architecture for automatic blood vessel segmentation. Multimed. Tools. Appl. 2023, 82, 43207-31.
45. Wang, Z.; Jia, L. V.; Liang, H. Partial class activation mapping guided graph convolution cascaded U-Net for retinal vessel segmentation. Comput. Biol. Med. 2024, 178, 108736.
46. Isensee, F.; Wald, T.; Ulrich, C.; et al. nnU-Net revisited: a call for rigorous validation in 3D medical image segmentation. In Medical Image Computing and Computer Assisted Intervention–MICCAI 2024. Springer, Cham; 2024. pp. 488–98.
47. Ding, W.; Sun, Y.; Huang, J.; et al. RCAR-UNet: retinal vessel segmentation network algorithm via novel rough attention mechanism. Inform. Sci. 2024, 657, 120007.
48. Yang, B.; Qin, L.; Peng, H.; Guo, C.; Luo, X.; Wang, J. SDDC-Net: a U-shaped deep spiking neural P convolutional network for retinal vessel segmentation. Digit. Signal. Process. 2023, 136, 104002.
49. Kato, S.; Hotta, K. Expanded tube attention for tubular structure segmentation. Int. J. Comput. Assist. Radiol. Surg. 2024, 19, 2187-93.
50. Zhuang, J. LadderNet: multi-path networks based on U-Net for medical image segmentation. arXiv 2018, arXiv: 1810.07810. https://doi.org/10.48550/arXiv.1810.07810. (accesssed 21 Jul 2025).
51. Schlemper, J.; Oktay, O.; Schaap, M.; et al. Attention gated networks: learning to leverage salient regions in medical images. Med. Image. Anal. 2019, 53, 197-207.
52. Li, X.; Jiang, Y.; Li, M.; Yin, S. Lightweight attention convolutional neural network for retinal vessel image segmentation. IEEE. Trans. Ind. Inform. 2021, 17, 1958-67.
53. Zhu, J.; Lan, Z.; Wen, X.; Cai, S.; Xu, Y. DASENet: a detail aware U-Net with shuffle excitation for retinal vessel segmentation. In 2023 6th International Conference on Software Engineering and Computer Science (CSECS), Chengdu, China. Dec 22-24, 2023. IEEE; 2023. p. 1–7.
Cite This Article
How to Cite
Download Citation
Export Citation File:
Type of Import
Tips on Downloading Citation
Citation Manager File Format
Type of Import
Direct Import: When the Direct Import option is selected (the default state), a dialogue box will give you the option to Save or Open the downloaded citation data. Choosing Open will either launch your citation manager or give you a choice of applications with which to use the metadata. The Save option saves the file locally for later use.
Indirect Import: When the Indirect Import option is selected, the metadata is displayed and may be copied and pasted as needed.
About This Article
Copyright

Data & Comments
Data
0












Comments
Comments must be written in English. Spam, offensive content, impersonation, and private information will not be permitted. If any comment is reported and identified as inappropriate content by OAE staff, the comment will be removed without notice. If you have any queries or need any help, please contact us at support@oaepublish.com.